| |
|
|
| |
künstliche Objekte auf und um Mars |
|
| |
1 |
Vorbeiflug Sonden |
| 2 |
Orbiter |
| 3 |
weich gelandete Sonden |
| 4 |
Rover |
|
|
1 |
Vorbeiflug Sonden |
|
| |
| |
Name |
Ankunft |
Nation |
Masse |
| 1a |
Mariner 4 |
7. 1965 |
USA |
261 |
| 1b |
Zond 3 |
7. 1965 |
UdSSR |
|
| 1c |
Mariner 6 |
7. 1969 |
USA |
413 |
| 1d |
Mariner 7 |
8. 1969 |
USA |
413 |
|
|
| |
|
|
1a |
Mariner 4 |
 |
Mariner 4 startete am 28. November 1964 und flog als erste irdische Raumsonde überhaupt am 15. Juli 1965 am Mars in einer Entfernung von 9844 Kilometern vorbei. Die Sonde nahm innerhalb von 22 Minuten 22 Bilder auf, die während der nächsten Tage zur Erde gesandt wurden. Sie zeigten einen sehr mondähnlichen Mars, deckten aber nur 1 % der Oberfläche ab. Weiterhin wurde festgestellt, dass der Mars kein oder nur ein sehr schwaches Magnetfeld besitzt. Die Atmosphäre weist einen Bodendruck von maximal 30 mbar auf und besteht zu 80 bis 100 % aus Kohlendioxid und maximal 16 % Stickstoff oder 8 % Argon. Bis zum 20. Dezember 1967 war eine Kommunikation mit der Sonde möglich. |
|
|
1b |
Zond 3 |
 |
Die Sonde sollte ursprünglich zum Mars fliegen. Man verpasste aber das Startfenster und änderte kurzerhand das Programm. Vorbeiflug am Mond und erfolgreiche Tests der Kommunikation über Mars-Entfernung. Sollte ursprünglich zum Mars fliegen, durch Startverzögerungen war dies allerdings nicht mehr möglich. Diese Sonde wird von vielen Autoren nicht zu den Marssonden gezählt. |
|
|
1c |
Mariner 6 |
 |
Sie wurde auf eine sehr schnelle Bahn geschickt und passierte den Mars am 31. Juli 1969. Dadurch war die Vorbeiflugdistanz mit 3430 Kilometern erheblich geringer als bei Mariner 4. Dies und weitere Verbesserungen von Sendern und Empfängern erlaubten es, ein Bild innerhalb weniger Minuten zu übertragen. Die Sonde machte zunächst aus größerer Entfernung 50 Aufnahmen des Mars, die den ganzen Planeten zeigten, dann beim Vorbeiflug weitere 25 Aufnahmen mit der Weitwinkelkamera, die direkt übertragen wurden. |
|
|
1d |
Mariner 7 |
|
Am 2. August 1969 fertigte die Sonde 93 Aufnahmen bei der Annäherung an, die zwei volle Rotationen des Planeten abdeckten. Bei der Passage gab es weitere 33 Bilder. Beide Sonden passierten den Mars auf der Südhalbkugel und kartierten 20 Prozent der Oberfläche. Der Bodendruck und die Temperaturen konnten genauer bestimmt werden. Auf Aufnahmen von Mariner 7 konnte die Größe von Phobos, dem größeren der beiden Marsmonde, zu 22,4 × 17,6 km bestimmt werden. |
|
|
|
|
|
2 |
Übersicht der Orbiter |
|
| |
| |
Name |
einschwenken |
Ende |
Nation |
Masse |
| 2a |
Mariner 9 |
11. 1971 |
10. 1972 |
USA |
559 |
| 2b |
Mars 5 |
12.2.1974 |
28.2.1974 |
UdSSR |
|
| 2c |
Mars Global Surveyor |
9. 1997 |
11. 2006 |
USA |
1031 |
| 2d |
2001 Mars Odyssey |
10. 2001 |
aktiv |
USA |
758 |
| 2e |
Mars Express |
12. 2003 |
aktiv |
Europa |
116 |
| 2f |
Mars Reconnaissance Orbiter |
3. 2006 |
aktiv |
USA |
899 |
| 2g |
Mars Orbiter Mission |
9. 2014 |
aktiv |
Indien |
1337 |
| 2h |
MAVEN |
9. 2014 |
aktiv |
USA |
1025 |
| 2i |
ExoMars |
10. 2016 |
aktiv |
Europa |
3730 |
| 2j |
Mars Cube One |
3. 2018 |
2. 2020 |
USA |
2x13,5 |
| 2k |
Al-Amal |
2. 2021 |
aktiv |
VAE |
1350 |
| 2l |
Tianwen-1 |
2. 2021 |
aktiv |
China |
5000 |
|
|
| |
|
|
2a |
Mariner 9 |
 |
startete am 30. Mai 1971. Am 14. November 1971 zündete die Sonde ihr Triebwerk für 915,6 Sekunden und schwenkte in einen 1397 km x 17.616 km Orbit mit einer Inklination von 64,28 Grad ein. Mariner 9 war damit die erste irdische Sonde überhaupt, die in eine Umlaufbahn um einen anderen Planeten einschwenkte. Zu diesem Zeitpunkt tobte auf dem Mars der größte Staubsturm seit 1953, sodass die ersten Fotos nur die Gipfel einiger hoher Vulkane zeigten. Zu Beginn des Jahres 1972 klarte sich die Atmosphäre auf, und Mariner 9 begann den Mars zu kartieren. Es wurden Oberflächentemperaturen und die Zusammensetzung der Atmosphäre bestimmt.
Die Valles Marineris erhielten ihren Namen zu Ehren der Sonde Mariner 9, auf deren fotografischen Aufnahmen sie entdeckt wurden. |
|
|
2b |
Mars 5 |
 |
Die Sonde kam planmäßig im 12.2.1974 am Mars an und konnte insgesamt etwa 100 Bilder zur Erde übermitteln. Am 28. Februar kam es jedoch zum plötzlichen Druckverlust und darauf dem Komplettausfall der Sonde. Wahrscheinlich wurde sie wohl von einem Mikrometeoriten getroffen. |
|
|
2c |
Mars Global Surveyor |
 |
Erforschung des Planeten Mars aus einer Umlaufbahn. Sie startete 1996 an Bord einer Delta-II-Trägerrakete und begann etwa im März 1999 mit der Erkundung des Roten Planeten. Am 2. November 2006 ging die Sonde aufgrund eines Fehlers des Bodenpersonals verloren. |
|
|
2d |
2001 Mars Odyssey |
 |
Nach ihrer Ankunft am Mars am 24. Oktober 2001 reduzierte die Sonde die Geschwindigkeit mit Hilfe eines Aerobraking-Manövers, um dadurch in einen Orbit um den Mars einzuschwenken. Dabei durchflog die Sonde mehrfach die obersten Atmosphärenschichten des Mars, um durch die entstehende Reibung abgebremst zu werden. Der so gesparte Treibstoff ermöglichte eine kleinere Trägerrakete.
Die Hauptphase der Mission begann im Februar 2002 und endete im August 2004. Das erste Mal in der Geschichte der Marsforschung wurde im Rahmen der Mission eine globale Karte der chemischen Elemente auf der Oberfläche erstellt. Ein Schwerpunkt der Mission lag dabei auf der Suche nach Wassereis. Zudem wurde die Strahlungsbelastung in niedrigen Marsorbits untersucht, um die Risiken zukünftiger bemannter Marsmissionen besser zu erforschen.
Der Orbiter diente zur Datenübertragung zwischen dem am 6. August 2012 gelandeten Rover Curiosity und dem Deep Space Network auf der Erde. Der Orbiter erreichte im April 2021 das 20. Jahr nach dem Start und ist damit die bisher langlebigste Marsmission. In dieser Zeit wurden über eine Million Bilder empfangen und 18.000 mal wurde die Sonde als Relaisstation genutzt. Der Orbiter befindet sich bis heute in Betrieb. |
|
|
2e |
Mars Express |
 |
Hauptaufgabe der Mission war die vollständige Kartografierung des Mars, die Erforschung seiner Atmosphäre, seiner Oberfläche sowie des Materials, das sich in bis zu zwei Metern Tiefe befindet. Zusätzlich hatte die Sonde das Landegerät Beagle 2 an Bord.
Der Lander Beagle 2 sollte am 25. Dezember 2003 auf dem Mars landen, um dort nach Spuren organischen Lebens zu suchen. Da trotz wiederholter Versuche kein Kontakt hergestellt werden konnte, wurde das Landegerät am 11. Februar 2004 als verloren erklärt. Nach der erfolglosen Suche nach Beagle 2 wurden nach und nach auch die anderen Instrumente an Bord aktiviert.
Mars Express erreichte die planmäßige Umlaufbahn um den Mars im Januar 2004. Die Sonde umkreist ihn auf einer elliptischen polnahen Bahn (Inklination: 86°) im Minimalabstand von fast 300 km und Maximalabstand von 11.000 km.
Mars Express analysierte den Kometenkern sowie den Kometenschweif des Kometen Siding-Springs. |
|
|
2f |
Mars Reconnaissance Orbiter |
 |
Mars-Orbiter, erreichte am 10. März 2006 den Marsorbit, begann im November 2006 wissenschaftlichen Betrieb. Die Aufnahmen sollen auch kleinere geologische Strukturen erkennen lassen, z. B. hydrothermale Quellen, in deren Nähe fossiles Leben vermutet wird. Sie ermöglichen damit auch eine gezieltere Auswahl interessanter Landestellen für weitere Marsmissionen, wie für die am 25. Mai 2008 am Mars angekommene Phoenix-Sonde und das Mars Science Laboratory im August 2012.
Weiterhin sucht der MRO mit Radar nach dicht unter der Mars-Oberfläche vorhandenem Wasser und Eis, insbesondere auch an den Polkappen. Schließlich soll die Sonde für zukünftige Landemissionen als Relaisstation dienen. |
|
|
2g |
Mars Orbiter Mission |
 |
Der Start der Sonde erfolgte am 5. November 2013 mit einer PSLV-XL-Rakete vom Satish Dhawan Space Centre auf der Insel Sriharikotta im Bundesstaat Andhra Pradesh (Indien). Zunächst schwenkte sie in eine Umlaufbahn um die Erde ein. Am 30. November 2013 verließ sie dann mit einem 22-minütigen Brennen des Haupttriebwerks ihre Umlaufbahn und nahm Kurs auf den Mars. Am 24. September 2014 erreichte sie den Mars und schwenkte dort in eine stark elliptische Umlaufbahn in 500 × 80.000 km Höhe ein. Am 25. September 2014 übertrug die ein erstes Farbfoto der Mars-Atmosphäre, das mit der Mars Color Camera (MCC) aus 8449 km Höhe aufgenommen worden war |
|
|
2h |
MAVEN |
 |
Zweite Mission des Mars-Scout-Programms, soll die Marsatmosphäre untersuchen und trat am 22. September 2014 in einen Marsorbit ein.
Am 6. November 2014 übertrug MAVEN als Repeater mehrere Bilder des Rovers Curiosity zum Deep Space Network, als sich MAVEN im Orbit über Curiosity befand.
MAVEN führte während seiner Mission vier so genannte „Deep Dip“-Manöver durch. Dafür wurde MAVENs Periapsis auf 125–150 km abgesenkt. Die Sonde fliegt dann durch die obersten Schichten der Atmosphäre und kann diese mit ihren wissenschaftlichen Instrumenten untersuchen.Im Februar 2015 durchflog MAVEN die abendliche Terminatorregion Im April 2015 die Subpolarregion, im Juni 2015 die Region des morgendlichen Terminators und schließlich im August 2015 die Südpolarregion
Zwischen dem 11. Februar und dem 5. April 2019 wurde die Umlaufbahn durch gezielte Atmosphärenbremsung abgesenkt. Der marsnähste Punkt des Orbits näherte sich von 151 km auf 132 km über der Oberfläche, der marsfernste von 6050 auf 4570 km. Dadurch verringerte sich die Umlaufzeit, so dass MAVEN öfter als bisher Kontakt zu den Marsrovern aufnehmen und als Kommunikationsrelais dienen konnte.
MAVEN untersucht weiterhin die Atmosphäre. Der Treibstoff wird noch für einen Betrieb bis mindestens 2030 reichen. |
|
|
2i |
ExoMars Trace Gas Orbiter |
 |
Orbiter im Rahmen des ExoMars-Programms der ESA. Ist am 19. Oktober 2016 in eine Marsumlaufbahn eingetreten. Primäres Ziel ist, ein besseres Verständnis der Vorgänge in der Marsatmosphäre zu erhalten und Gase wie Methan sowie andere Spurengase auf biologische oder geologische Ursachen hin zu untersuchen. Der Orbiter soll auch helfen, mögliche Landestellen für den 2022 geplanten ExoMars Rover zu finden und ihm dann als Relaisstation zur Erde dienen. |
|
|
2j |
Mars Cube One |
 |
Die Mars-Orbiter, erreichten am 10. März 2006 den Marsorbit, begann im November 2006 wissenschaftlichen Betrieb. Sie waren als Technologiedemonstrator nicht zwingend notwendig für den Lander, konnten aber die Kommunikation, die sonst vom Mars Reconnaissance Orbiter (MRO) übernommen würde, deutlich beschleunigen.
Die Landung von InSight, dessen Daten von den MarCO-Sonden weitergeleitet wurden, erfolgte am 26. November 2018.
Daten der experimentellen MarCOs konnten bis zum 29. Dezember 2018 bzw. 4. Januar 2019 letztmals empfangen werden. Nach weiteren erfolglosen Kontaktversuchen ab September 2019 wurde die Mission am 2. Februar 2020 offiziell beendet. |
|
|
2k |
Al-Amal |
 |
Die Raumsonde der Vereinigten Arabischen Emirate, die seit dem 9. Februar 2021 als erste interplanetare Raumfahrtmission eines arabischen Staates den Mars umkreist und ab Mitte 2021 die Marsatmosphäre und das Marsklima untersuchen soll. Sie wurde am 19. Juli 2020 mit einer H-IIA-Trägerrakete vom japanischen Tanegashima Space Center gestartet. |
|
|
2l |
Tianwen-1 |
.gif) |
Die Sonde wurde am 23. Juli 2020 mit einer Trägerrakete vom Typ Langer Marsch 5 gestartet und erreichte am 10. Februar 2021 als erste chinesische Marssonde eine Umlaufbahn um den Planeten. |
|
|
|
|
|
3 |
Übersicht der weich gelandeten Sonden |
|
| |
| |
Name |
Landung |
Nation |
Landestelle |
Masse |
Ende |
| 3a |
Mars 3 |
12. 1971 |
UdSSR |
Terra Sirenum |
450 |
12. 1971 |
| 3b |
Mars 6 |
3. 1974 |
UdSSR |
Terra Margaritifer |
350 |
3. 1974 |
| 3c |
Viking 1 |
7. 1976 |
USA |
Cryse Planitia |
657 |
11. 1982 |
| 3d |
Viking 2 |
9. 1976 |
USA |
Utopia Planitia |
657 |
4. 1980 |
| 3e |
Pathfinder |
7. 1997 |
USA |
Ares Valles |
264 |
9. 1997 |
| 3f |
Phoenix |
5. 2008 |
USA |
Vastitas Borealis |
350 |
11. 2008 |
| 3g |
InSight |
11. 2018 |
USA |
Elysium Planitia |
694 |
aktiv |
|
|
| |
|
|
3a |
Mars 3 |
 |
Der Lander von Mars 3 fing nach der Landung in der Randregion des Kraters Ptolemäus ♁(45° Süd, 158° West) an, ein Panorama zu übertragen, verstummte jedoch nach wenigen Sekunden (Datenübertragungsbeginn 90 Sekunden nach der Landung, Abbruch der Übertragung 20 Sekunden später). Die Ursache für den Ausfall sehen die Wissenschaftler in einem globalen Staubsturm, der damals tobte. Die Orbiter nahmen Bilder auf Film auf. Bevor der Staubsturm sich legte, hatten die Partikel den Film belichtet, sodass die Bilder nur wenige Details zeigen. |
|
|
3b |
Mars 6 |
|
am 13. August 1973 fiel ein Telekommunikationskanal des Senders wegen eines defekten Transistors aus. Der Lander wurde von der stummen Sonde automatisch am 12. März 1974 abgetrennt. Er lieferte Messungen bis zum Aufsetzen bei 25° westlicher Länge und 24° südlicher Breite, verstummte dann jedoch. Entweder ist er auf der Oberfläche zerschellt oder bei der Landung umgekippt. |
|
|
3c
3d
|
Viking 1
und 2
|
 |
Das Viking-Programm der NASA war ein Höhepunkt bei der Erforschung des Mars in den 1970er Jahren. Die zwei Raumsonden Viking 1 und 2 landeten am 20. Juli und 3. September 1976 erfolgreich und sandten erstmals detaillierte Bilder von der Oberfläche des roten Planeten. |
|
|
3e |
Pathfinder |
 |
Er brachte den ersten erfolgreichen Mars-Rover Sojourner auf die Marsoberfläche. Sie landete am 4. Juli 1997 in einem Gebiet namens „Ares Vallis“, das sich in der nördlichen Hemisphäre befindet und eines der felsigsten Gebiete auf dem Mars ist. Der Ort wurde von den Wissenschaftlern gewählt, weil eine Landung dort relativ sicher war und dort eine Vielzahl verschiedener Felsen abgelagert wurden. |
|
|
3f |
Phoenix |
 |
Entdeckung von Wassereis. Phoenix war im Gegensatz zu den 2003 gestarteten Rovern Spirit und Opportunity eine stationäre Sonde. Sie landete in einer Region des Mars, wo nach den Daten von Mars Odyssey dicht unter der Oberfläche ab etwa zwei bis fünf Zentimeter Tiefe der Boden bis zu 80 Prozent aus Wassereis bestehen soll. Um das Eis zu studieren, konnte Phoenix mit einem Roboterarm in eine Tiefe von bis zu einem halben Meter in den Grund vordringen.
Die perfekte Landung erfolgte am 25. Mai 2008 . Wegen der Entfernung zur Erde von 276 Millionen Kilometern konnten die ersten Funksignale von der Landestelle erst 15 Minuten später auf der Erde empfangen werden. Um die Telemetriedaten während der kritischen EDL-Phase (Entry, Descent and Landing) sicher aufzeichnen zu können, waren die Umlaufbahnen der aktiven Mars-Orbiter so abgestimmt worden, dass die Signale der Sonde von allen drei Orbitern (MRO, Mars-Express und Mars Odyssey) empfangen werden konnten. |
|
|
3g |
InSight |
 |
InSight (Interior Exploration using Seismic Investigations, Geodesy and Heat Transport) ist eine Mars-Mission im Discovery-Programm der NASA. Der Start war am 5. Mai 2018 und am 26. November 2018 Es wurde der stationäre Lander auf der Oberfläche des Mars abgesetzt, womit er seit 872 Sol aktiv ist. Der Lander ist mit einem Seismometer und einer Wärmeflusssonde ausgestattet. Mit ihren Messungen soll die frühgeologische Entwicklung des Mars erforscht und damit das Verständnis der Entstehung der erdähnlichen Planeten des Sonnensystems und des Erdmonds verbessert werden. |
|
|
|
|
|
4 |
Übersicht der Rover |
|
| |
| |
Name |
Landung |
Ende |
Nation |
Landestelle |
Landetechnik |
Rover Masse |
| 4a |
Sojourner |
7. 1997 |
9. 1997 |
USA |
Ares Valles |
|
11,5 |
| 4b |
Spirit |
1. 2004 |
5. 2011 |
USA |
Gusev Krater |
Airbag |
185 |
| 4c |
Opportunity |
1. 2004 |
6. 2018 |
USA |
Meridiani Planum |
Airbag |
185 |
| 4d |
Curiosity |
8. 2012 |
aktiv |
USA |
Gale Krater |
Sky Crane |
899 |
| 4e |
Perseverance |
2. 2021 |
aktiv |
USA |
Jezero Krater |
Sky Crane |
1025 |
| 4f |
Zhurong |
5. 2021 |
aktiv |
China |
Utopia Planitia |
|
250 |
|
|
| |
|
|
4a |
Sojourner |
 |
Die Bewegungsfreiheit des Sojourner erlaubte es, viel mehr Gesteins- und Bodenproben zu analysieren, als es einer traditionellen Sonde möglich gewesen wäre. Die Härte der Marsoberfläche konnte mit dem Wheel Abrasion Experiment bestimmt werden, bei dem der Abrieb der Räder gemessen wurde. Bis zur letzten Übertragung am 27. September 1997 sendete Mars Pathfinder 16.500 von der Landeeinheit und 550 vom Rover aufgenommene Bilder sowie mehr als 15 chemische Analysen von Boden und Gestein zur Erde zurück, außerdem ausführliche Wetterdaten. Als wahrscheinlichste Ursache für den Ausfall der Sonde wird vermutet, dass die Batterien bei den tiefen Nachttemperaturen auf der Oberfläche des Mars eingefroren sind.
Die neuesten Forschungsergebnisse und Bilder wurden erstmals sofort im damals noch jungen World Wide Web veröffentlicht.
Trotz des großen Erfolgs der Mission war sie ursprünglich „nur“ als Technologie-Demonstrations-Mission gedacht. So sollte sich der Sojourner zum Beispiel als erstes Fahrzeug auf dem Roten Planeten bewähren. Weiterentwicklungen der Mission sind die ähnlich konzipierten, aber viel größeren Exploration Rover Spirit und Opportunity. |
|
|
4b |
Spirit |
 |
Die Sonde trat am 4. Januar 2004 in die Atmosphäre des Mars ein. Sie wurde, durch einen Hitzeschild geschützt, zunächst in der Atmosphäre bis auf Schallgeschwindigkeit abgebremst. Dann entfaltete sich ein Fallschirm, an dessen Leinen ein Raketensystem oberhalb der Sonde angebracht war, das horizontale Bewegungen in der Atmosphäre ausgleichen sollte. Kurz vor dem Aufsetzen wurden schlagartig schützend um die Sonde gelegte Airbags aufgeblasen. Die letzten Meter über der Oberfläche wurden dann im freien Fall zurückgelegt. Nachdem der Lander dann zur Ruhe gekommen war, wurden die Airbags wieder entlüftet.
Die Landeeinheit besitzt insgesamt drei Rampen. Da die Airbags weiterhin die vordere Rampe versperren, drehte sich der Rover um 120 Grad im Uhrzeigersinn, um über eine nach Nord-Westen gerichtete Ausweichrampe die Landeeinheit zu verlassen. |
|
|
4c |
Opportunity |
|
Die Schwestersonde von Spirt, Opportunity, landete am 25. Januar 2004 in der Tiefebene Meridiani Planum. Je nach Oberflächenbeschaffenheit legte der Rover am Tag etwa 100 m, insgesamt etwa 3 km zurück und war bis zum 10. Juni 2018 aktiv. Der Rover konnte nach einem Staubsturm nicht wieder aktiviert werden. |
|
|
4d |
Curiosity |
 |
Die bis zum 22. August 2012 am Landeplatz dauernde Inbetriebnahme von Fahrzeug und Instrumenten verlief bis auf einen Windsensor erfolgreich – während der Probennehmer erstmals auf dem Weg zum 400 Meter entfernten Ziel „Glenelg“ an geeignetem Material erprobt wurde. Bis Oktober 2020 hatte der Rover knapp 23,13 km zurückgelegt.
sky crane https://www.youtube.com/watch?v=qaUhLXolGaI |
|
|
4e |
Perseverance |
 |
Am 22. Februar 2021 wurden erstmals Tonaufnahmen vom Mars veröffentlicht.
Am 19. April 2021 flog die Helikopterdrohne Ingenuity für 39 Sekunden erstmals auf dem Mars und erreichte dabei eine Flughöhe von 3 Metern. Damit flog erstmals ein Helikopter auf einem fremden Himmelskörper.
Am 20. April 2021 wurde erstmals in der Geschichte der Raumfahrt auf einem fremden Planeten Sauerstoff gewonnen. Das Instrument MOXIE stellte bei diesem ersten Test auf dem Mars innerhalb einer Stunde 5,4 Gramm Sauerstoff aus Kohlenstoffdioxid her. Ein Astronaut könnte hiermit für zehn Minuten atmen. |
|
|
4f |
Zhurong |
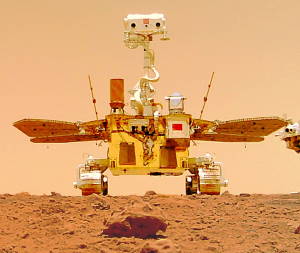 |
Der Rover soll zunächst noch von der Landeplattform aus mit der Stereokamera auf dem Mast an seiner Vorderseite die Umgebung fotografieren. Am 8. Marstag nach der Landung soll er von der Ladefläche rollen und mit der eigentlichen Marserkundung beginnen. Die nominelle Höchstgeschwindigkeit des Rovers beträgt 200 Meter pro Stunde, er konnte im Labor Steigungen von bis zu 30° bewältigen Über kleinere Steine auf dem Weg kann der Rover hinwegfahren; die sechs Räder besitzen widerstandsfähige, abriebfeste Laufflächen und elastische Speichen zur Vibrations- und Stoßdämpfung. Er kann seine Bodenfreiheit über die Arme, an denen die Räder befestigt sind, etwas anheben, geht aber größeren Hindernissen prinzipiell eher aus dem Weg, wozu er sich durch Drehung der Räder um 90° auch in seitlicher Richtung bewegen kann. Dadurch wird die effektiv zurückgelegte Strecke relativ gering sein. Vor Beginn der Mission gingen die Entwickler von einer effektiven Marschgeschwindigkeit von 40 Meter pro Stunde aus. |
|
|
| |
|
|
| |
 |
|
| |
Die drei Rover Spirt, Sojourner und Curiosity im Größenvergleich. |
|
| |
|
|